FView plugin tutorial: change-based triggering of an external device¶
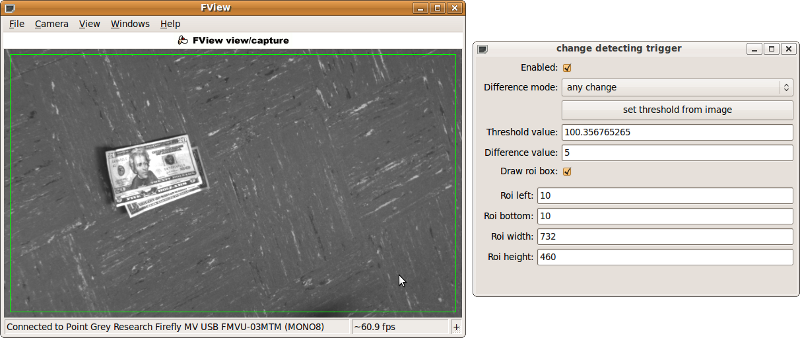
This tutorial illustrates the steps necessary to trigger an external device based on some change in the image. Specifically, we will generate a pulse on the CamTrig device when luminance changes more than a specified amount.
A working copy of this code can be found at http://github.com/motmot/fview_change_trigger/
Prerequisites¶
- read and understand FView plugin tutorial: live histogram of image intensity values
- the CamTrig hardware device plugged in and functioning
- fview_ext_trig (software for the CamTrig) installed and functioning
Introduction¶
From FView plugin tutorial: live histogram of image intensity values, you should have a working knowledge of how to create a Python package directory structure and a setup.py file with the appropriate entry point to make an FView plugin. Therefore, this tutorial will focus only on the unique aspects of change-based triggering.
Create the plugin logic¶
Now we’re going to create the module motmot.fview_change_trigger.fview_change_trigger with our new class FviewChangeTrigger. Open a new file named:
base/motmot/fview_change_trigger/fview_change_trigger.py
The contents of this file:
from __future__ import with_statement, division
import pkg_resources
import warnings, threading
import enthought.traits.api as traits
import motmot.fview.traited_plugin as traited_plugin
import motmot.fview_ext_trig.ttrigger as ttrigger
import numpy as np
from enthought.traits.ui.api import View, Item, Group
class FviewChangeTrigger(traited_plugin.HasTraits_FViewPlugin):
plugin_name = 'change detecting trigger'
trigger_device = traits.Instance(ttrigger.DeviceModel)
enabled = traits.Bool(False)
capture_background = traits.Button
_capture_background_notify = traits.Bool(False) # pass value to realtime thread
difference_mode = traits.Trait( 'darker', 'lighter', 'any change' )
draw_roi_box = traits.Bool(False)
roi_left = traits.Int(-1)
roi_bottom = traits.Int(-1)
roi_width = traits.Int(-1)
roi_height = traits.Int(-1)
threshold_value = traits.Float
difference_value = traits.Float(5)
# Store some values about the camera
camera_cam_id = traits.String(transient=True)
camera_max_width = traits.Int(transient=True)
camera_max_height = traits.Int(transient=True)
traits_view = View(Group(Item(name='enabled'),
Item(name='difference_mode'),
Item(name='capture_background',
label='set threshold from image',
show_label=False),
Item(name='threshold_value'),
Item(name='difference_value'),
Item(name='draw_roi_box'),
Group(Item(name='roi_left'),
Item(name='roi_bottom'),
Item(name='roi_width'),
Item(name='roi_height'),
)))
def __init__(self,*args,**kwargs):
super(FviewChangeTrigger,self).__init__(*args,**kwargs)
def set_all_fview_plugins(self,plugins):
"""Get reference to 'FView external trigger' plugin"""
# This method is called by FView to let plugins know about
# each other.
for plugin in plugins:
if plugin.get_plugin_name()=='FView external trigger':
self.trigger_device = plugin.trigger_device
if self.trigger_device is None:
raise RuntimeError('this plugin requires "FView external trigger"')
def _capture_background_fired(self):
self._capture_background_notify = True
def camera_starting_notification(self,cam_id,
pixel_format=None,
max_width=None,
max_height=None):
if self.camera_cam_id != '':
warnings.warn('FviewChangeTrigger only supports one camera')
return
self.camera_cam_id = cam_id
self.camera_max_width = max_width
self.camera_max_height = max_height
# default margin ( in pixels )
margin = 10
if self.roi_left==-1:
self.roi_left = margin
if self.roi_bottom==-1:
self.roi_bottom = margin
if self.roi_width==-1:
self.roi_width= self.camera_max_width-self.roi_left-margin
if self.roi_height==-1:
self.roi_height= self.camera_max_height-self.roi_bottom-margin
def process_frame(self,cam_id,buf,buf_offset,timestamp,framenumber):
draw_points = []
draw_linesegs = []
if cam_id != self.camera_cam_id:
return draw_points, draw_linesegs
l = self.roi_left
r = l + self.roi_width
b = self.roi_bottom
t = b + self.roi_height
if self.draw_roi_box:
draw_linesegs.extend( [ (l,b,l,t),
(l,t,r,t),
(r,t,r,b),
(r,b,l,b) ])
npbuf = np.asarray(buf) # make sure it's a numpy array
assert buf_offset==(0,0)
roi_buf = npbuf[b:t,l:r]
if self._capture_background_notify:
self._capture_background_notify = False
self.threshold_value = np.mean(roi_buf)
# turn of LED from any previous runs
self.trigger_device.led1 = False
if self.enabled:
current_value = np.mean(roi_buf)
fire_trigger = False
if self.difference_mode == 'darker':
if (self.threshold_value - current_value) > self.difference_value:
fire_trigger = True
elif self.difference_mode == 'lighter':
if (current_value - self.threshold_value) > self.difference_value:
fire_trigger = True
elif self.difference_mode == 'any change':
if abs(current_value - self.threshold_value) > self.difference_value:
fire_trigger = True
else:
raise ValueError('unknown difference_mode')
if fire_trigger:
# fire pulse on EXT_TRIG1
self.trigger_device.ext_trig1 = True
# toggle LED
self.trigger_device.led1 = True
return draw_points, draw_linesegs
A description of the above should go here.
![]()
Important links
- Home
- E-mail list archives/signup
- Download
- Screenshot gallery
- paper describing Motmot
- PDF of documentation
Table Of Contents
Previous topic
FView plugin tutorial: periodic triggering of an external device
Next topic
Camera trigger device with precise timing and analog input